
ドローンの自動飛行に使われる測位技術の3つの種類

ドローンの自動飛行とは、メーカーや第三者の製作したアプリ上であらかじめ設定した範囲内やルート、対象物の周辺の飛行などを行うことを指します。
ところで、そもそもドローンはどのようにして自身や対象物、ルートを把握して自動飛行しているのでしょうか。
現在のところ、ドローンが位置を把握する方法は主に以下の3つがあります。ここではそれぞれの仕組みを解説します。
「GPS方式」
GPSとは
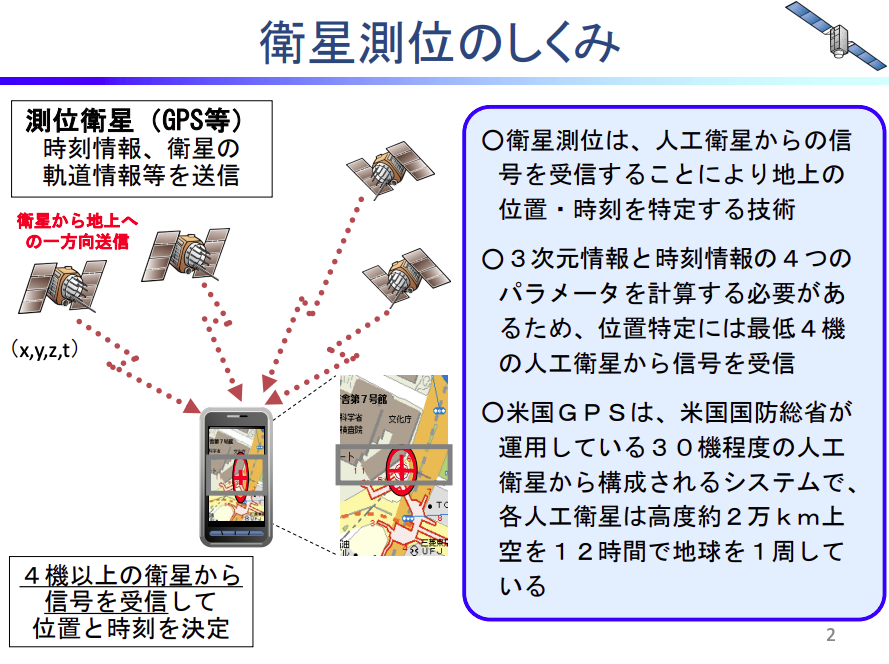
GPS(Global Positioning System)とは、衛星測位システムの中で全地球を利用可能範囲とする「GNSS」の1種。GNSSにはロシアのGLONASSやヨーロッパのGalileo、中国のBeidouなどがありますが、日本ではアメリカが開発したGPSを一般的に利用しています。GPS衛星は約30機が運用され、全世界でスマートフォンやカーナビなどに幅広く活用されています。
GPSを含む衛星測位システムは最低4機の人工衛星から信号を受信し、3次元情報と時刻情報の4つのパラメータを計算して、位置と時刻を特定しています。
「GPS方式」の課題
- 屋内等位置情報データを受信できない場合には利用できない
- 環境により精度が劣る(誤差数m〜数百m)
- 障害物との衝突回避はセンサー頼り
GPSを用いたドローンの自動飛行とは
現在、ドローンの自動飛行のほとんどはこのGPSを使った仕組みが主流。GPSにより「ドローンの現在の座標」と「目的地の座標」を測り飛行ルートを設定、飛行します。
GPSを用いたドローンの飛行は、RTKを用いた場合と比較しその精度は落ちます。理由は、ドローンのGPSによる測位は単独測位という形式でドローンに搭載された受信機のみでGPSを受信し、衛星からの距離計測や衛星の位置を元に計算されるためです。そのためドローンと基準局または観測点の2箇所でGPS情報を受信し、それぞれの位置情報から相対的に計算されるRTKより、どうしても精度は劣ってしまうのです。
GPSは誤差は数メートルあると言われていますが、大気の状況や反射(マルチパス)などにより誤差は大きくなります。さらにGPSの受信状態等によっては数百mずれるとも言われています。
GPSを用いたドローンは、GPSだけでは自身と目的地の位置情報しか把握できないため、周辺の障害物について知ることができません。
そのためほとんどのドローンには障害物を回避するためのセンサーが前後左右や上下に備わっています。安価なトイドローンなどには搭載されていないこともあり、センサーの有無や搭載数は機体により異なります。また搭載されていてもセンサーの死角についてはもちろん、障害物は避けることができません。
GPSを用いたドローンの一例
- DJI製 Mavic 2シリーズ などほぼすべてのドローン
- Parrot製 ANAFIシリーズ
など
「RTK方式」
-1024x767.jpg)
「RTK方式」とは
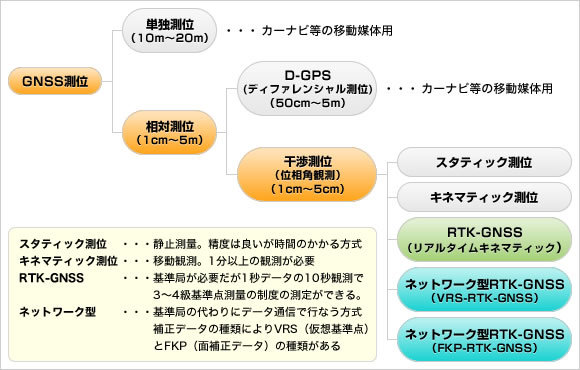
RTKは「Real Time Kinematic」の略でRTK−GNSSとも言われます。地上に設置した「基準局」からの位置情報データにより、高い精度の測位を実現する技術です。相対測位と呼ばれる測定方法の一つで、GPSなどGNSSから得られる位置情報と合わせて利用され、より精度を上げるために使用されます。実際にRTKの誤差は数センチ程度と言われています。
そんなRTKを使うには、「ネットワークRTK」または「基準局」(=CORS(連続観測基準点)にいずれかの利用が必要になります。どちらの方法でも、リアルタイムで位置情報が補正されます。
いずれの方法であってもRTK方式はGPS方式と同様、周辺環境を把握できる訳ではないので障害物の回避はセンサー頼り。あらかじめぶつからない高度や飛行範囲を設定しておく必要があります。
「RTKの方式」の課題
- GPS方式より導入費用やランニングコストがかかる
- 屋内等位置情報データを受信できない場合には利用できない
- 障害物との衝突回避はセンサー頼り
【基準局】を用いたドローンの自動飛行とは

ドローンに対応する基準局としては、例えばDJIのD-RTK2が挙げられます。既知点上(座標の把握できている場所)にD-RTK2を設置し、機体が受信するGPS情報を、モバイルステーションから情報で補正します。

メリット
- ランニングコスト不要(電子基準点補正情報配信サービスとの契約やインターネット接続不要のため)
デメリット
- 既知点がない場合は、既知点の座標の取得(測量)が必須
- 基準局の携帯が必須
【ネットワークRTK】を用いたドローンの自動飛行とは

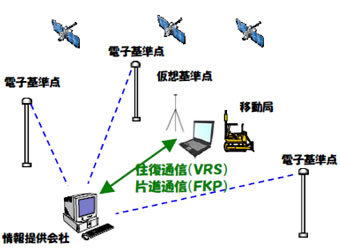
基準局が不要になる「ネットワークRTK」。国土地理院の電子基準点から計算された補正データを使用します。
リアルタイムで利用者の概略位置情報がインターネットを経由して配信サービスに送信され、配信サービスはそれを元に補正情報を利用者に配信する仕組みです。これにより位置情報が補正され、より精度の高い測位が可能となります。
利用者自身が基準局を用意する必要はありませんが、配信サービスが国の設置した全国各地の観測点を用いて情報を配信することで実現する方法です。
ドローンの場合、ドローンが取得・送信したGPSによる位置情報を、配信サービスからの情報により補正することでより精度の高い自動飛行が実現します。
メリット
- 基準局が不要
デメリット
- ランニングコストがかかる(電子基準点補正情報配信サービスの契約、インターネット通信環境が必要なため)
【補足】
- 電子基準点補正情報配信サービス(配信サービス)とは:国土地理院によって全国に設置された約1,300点のGNSS連続観測点を用いて、利用者から送信された概略位置情報から補正情報を計算して配信するサービス。
- ネットワークRTKは国土交通省の電子基準点がGPSのみの観測となるため、GLOMASSは利用不可。
■RTKを用いたドローンの一例
- DJI製 Phantom 4 RTK、Matrice 300 RTK
など
「SLAM方式」とは

「SLAM」とは
SLAMとは、自分自身の位置とその周辺環境を同時に把握する(環境地図を作成する)技術のことです。そんなSLAMには、以下2つの種類があります。
- LiDAR SLAM: レーザーセンサー (距離センサー) を使用
- Visual SLAM: カメラ・イメージセンサーからの画像を使用
GPSやRTKでの測位とは異なりSLAM方式は周辺環境を把握するため、障害物を把握した上で回避までできることが大きなメリットと言えます。
「SLAM方式」の課題
- 現在はまだ機体の選択肢が少ない
- (LiDAR SLAMの場合)導入費用が非常に高い
- 周辺環境等により利用できない場合がある
詳細は以下の記事を参考にしてください。

参考(外部リンク):ロボティクス:SLAMによる自己位置推定と地図構築/MathWorks
【SLAM技術】を用いたドローンの自動飛行とは
SLAM技術を活用したドローンなら、GPS等人工衛星からのデータを活用しなくとも自己位置の推定と周辺情報を把握できます。これにより屋内などGPSの受信できない環境下でも自動飛行が可能になるほか、”障害物の回避”までもを自律的に行うことが実現し、操縦士の介入をより減らすことが可能になりました。
さらにAI技術を活用し追跡対象物の数秒先の動きを予測することで、より正確な自律飛行が可能となる機体もあります。
LiDAR SLAMならレーザーセンサーを、Visual SLAMならカメラを機体に搭載しますが、現在ドローンの自動飛行のためには安価で軽量なVisual SLAMが使用されているケースが多いです。
LiDAR SLAMとVisual SLAMには参照記事の通り、それぞれにメリットデメリットがあります。搭載されたドローンもそれぞれ特性を活かしLiDAR SLAMは測量分野、Visual SLAMは警備や点検等撮影を目的とした分野に用いられています。
SLAM技術を用いたドローンの一例
- Skydio製 全てのドローン
- エアロセンス製 Aerobo Inspection
- 自律制御システム研究所製 PF2-Vision、PF-Mini-Vision
- Liberaware製 IBIS
- Emesent製 HOVERMAP
など
参考 〜自動飛行・自動航行・自律飛行の違い〜
自動飛行や自動航行、自律飛行の明確な定義は現在のところ無いようです。
現在のところ、操縦士が遠隔で管理しドローンが充電や離着陸も自律的に行うものを「自律型ドローン」、コンピューターで制御されて飛行し、操縦士の介入が少ないものを「自律飛行型ドローン」と表現されることが多いです。
そのためGPSを利用するものも自律飛行型と称されますが、従来は困難であった非GPS下での自律飛行や障害物回避を自律的に行うことから、 GPSを利用するものを「自動飛行」または「自動航行」、SLAM技術を活用したものが「自律飛行」と称されることが多い傾向にあります。
工場で倉庫で!室内でドローンを自動飛行させる方法

屋内でドローンを自動飛行させる為に必要なこと
従来のドローンは主にGPS受信することで機体の現在地を測位し、自動飛行を実現しています。しかしGPSは屋内や地下などではうまく受信できないほか、構造物や磁場の影響で精度が落ちるなど、利用できない場面が多々あります。そのためGPSを受信しない屋内等の環境下では、操縦士による手動の操縦に頼ることが多いのが現状です。
ですが、そんな「非GPS環境」であっても自動飛行を実現させるいくつかの技術が登場しています。ここではそれらについてご説明します。
SLAM技術を利用するドローンの屋内飛行

VisualSLAMはカメラ・イメージセンサーから用いた画像データから周囲の情報を取得している為、GPSが受信できなくても自動飛行させることが可能です。
VisualSLAM搭載ドローンとしては現在、米国Skydio社の「Skydio2」などが挙げられます。

ARマーカーを利用するドローンの屋内飛行

株式会社Spiralが開発した「MarkFlex Air(MFA)」は、既存のドローンに取り付け可能なモジュール、マーカー、自律飛行運用のためのソフトウェアの3つを使用します。ソフトウェアにより飛行経路を設計、経路情報が入力されたマーカーを飛行経路の要所に貼り付け、ドローン搭載のカメラがそれを読み取り経路情報を把握してルートを飛行するシステムです。
機体とマーカーで完結し通信環境などに左右されず、非常にシンプルな仕組みであることから現場への導入のしやすさで注目を集めている技術です。
モーションキャプチャを利用するドローンの屋内飛行
モーションキャプチャとは人や物、動物などの3次元の動きを計測・数値化し、その動きを3次元で表現するものです。リハビリ分野や、映画やゲームのCGキャラクター、VTuberなどに用いられるなど、人の動きであればボディスーツを着るだけのものなど、かなり手軽かつ身近なものとなってきています。
モーションキャプチャのシステムにはいくつかの種類がありますが、現在のところ対象物にマーカーを取り付け、それを複数台のカメラで撮影・検出して動きを読み取る「光学式」が主流。ドローンはカメラを搭載する上自動飛行により対象を追跡できるため、従来の光学式で利用していた複数台のカメラの代わりとして使われることもあります。
一方でモーションキャプチャを活用して他のドローンの動きを別のドローンが自動的に真似たり、人間などほかの動体の動きに合わせてドローンを飛行させる取り組みも行われています。
また応用として国内では、2018年の太陽企画株式会社がMV「Day n Nite」の撮影で世界初のドローンによるモーションコントロール撮影に成功。
モーションキャプチャシステム「OptiTrack」でドローンの座標を認識させてアニメーションの座標に重ね、ドローンが自動飛行するようにプログラムされたものです。正確に同じルートで複数回撮影し、多重合成を行うことで以下のような映像が制作されて実現しています。
まとめ
近年ドローンは業務利用のため、あらゆる環境下での高い精度が求められたり、安全性や操作の容易さが求められています。かつてドローンの測位や自動飛行はGPSに依存するものがほとんどでしたが、最近ではこんなにも色々な仕組みが利用され、そして精度の向上や使用環境の拡大が進んでいます。
ドローン導入の際にはまず、ご自分の会社で「どのような環境でドローンを使いたいか」「どんなデータを、どのくらいの精度で取得する必要があるか」を考えた上で、適した性能のドローンを選択してくださいね。
参考記事


